- Info
Learning a Local Feature Descriptor for 3D LiDAR Scans
This website presents our work on learning a local feature descriptor for 3D LiDAR scans. We use a Siamese CNN for learning the feature descriptor and a metric for matching the descriptors.
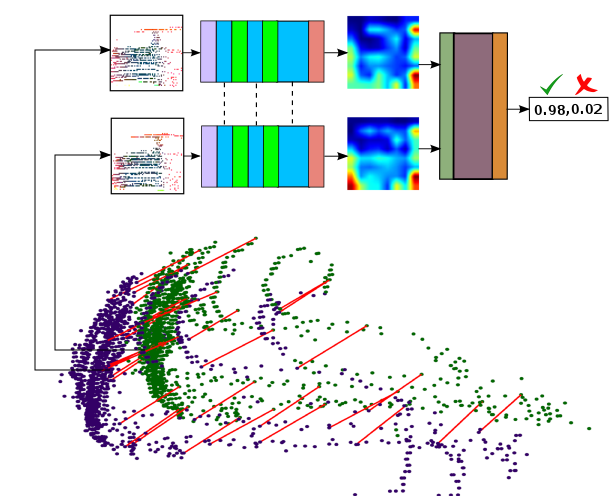
An illustration of keypoint matching using our learned
feature descriptor. Surface patches around the keypoints are passed
through the feature learning network to estimate feature descriptors.
These descriptors are then passed through the metric learning network to estimate a
matching score. Red lines show the correspondences between
the keypoints in the two 3D LiDAR scans.
Publication
-
Ayush Dewan, Tim Caselitz, Wolfram Burgard
Learning a Local Feature Descriptor for 3D LiDAR Scans
In Proc. of the IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018
Download
BibTeX
@inproceedings{dewan2018iros,
author = {Ayush Dewan and Tim Caselitz and Wolfram Burgard},
title = {Learning a Local Feature Descriptor for 3D LiDAR Scans},
booktitle = {Proc.~of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
address = {Madrid, Spain},
year = {2018},
url = {http://ais.informatik.uni-freiburg.de/publications/papers/dewan18iros.pdf}
}
Code and Dataset
We provide the scripts to train the model and a C++ library to interface the learned decriptor with PCL. We also provide the training and testing data used for learning the descriptor and example data to use the C++ API. For more details please refer to the
GitHub page.